5. C modeling#
5.1. Characteristics of modeling#
The modeling is AXIS, the contact formulation is DISCRETE, only the frictionless case is treated. A discrete 2D_ DIS_T element makes it possible to block rigid body movements.
The contact is processed with the projected conjugate gradient algorithm GCP.
5.2. Characteristics of the mesh#
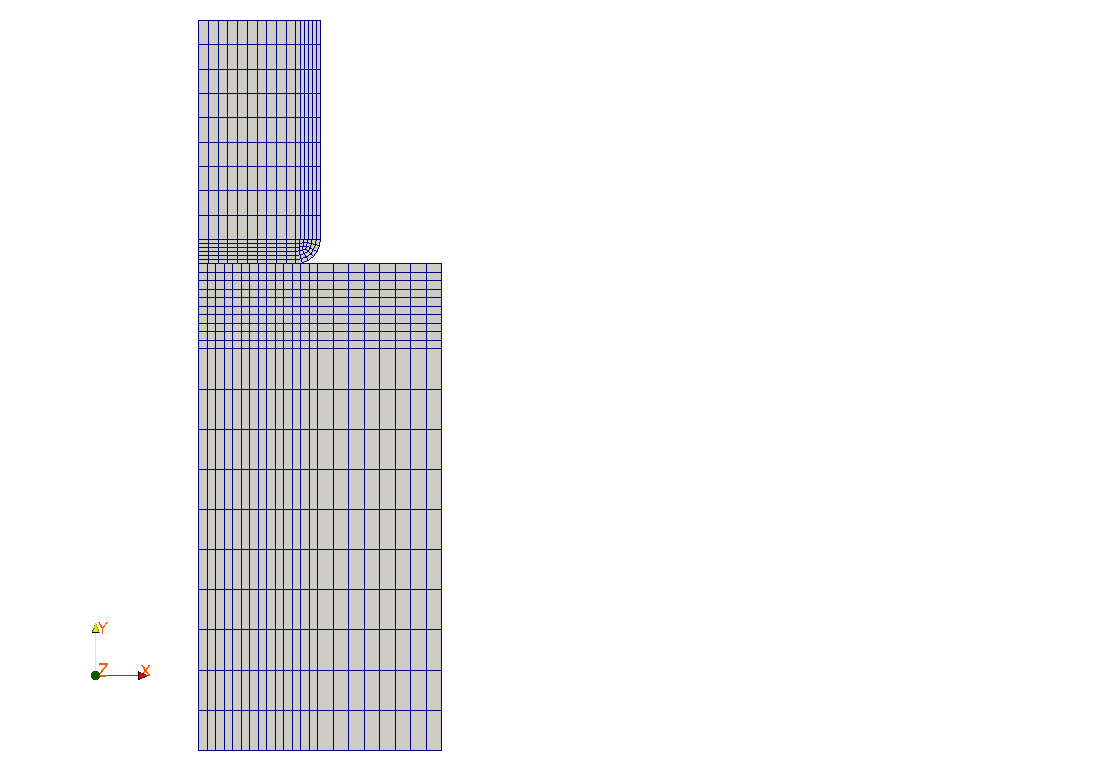
Number of knots: 743
Number of meshes and types: 671 QUAD4.
5.3. Tested sizes and results#
5.4. notes#
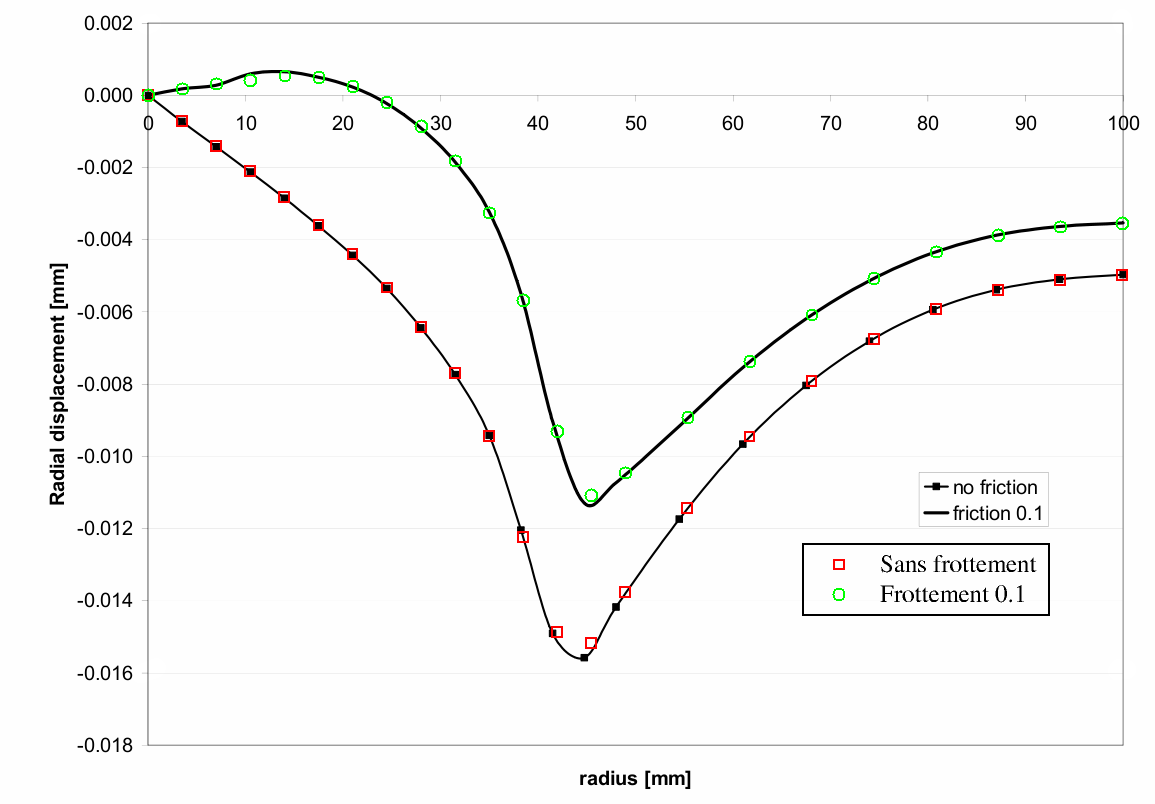
Figure 2: Radial displacement with and without friction (MARC and*Code_Aster*)
The results obtained by the discrete formulation in*Code_Aster* are in very good agreement with those of the reference codes. The figure above shows, for example, that the radial displacement fits perfectly with that of the references (here MARC).
The discrete formulation gives substantially the same results as the continuous formulation (modeling A) but requires a slightly more complicated data setup. In fact, the movement of a vertical rigid body must be blocked by adding a spring of low stiffness between the 2 bodies.