5. E modeling#
5.1. Geometry and modeling#
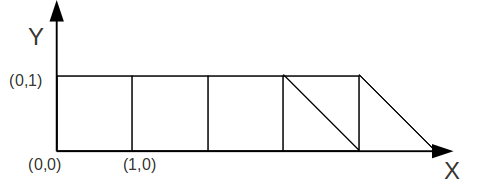
The mesh is composed of:
5.2. Orientation of the local coordinate system#
In order to define the local coordinate system for these elements, the keyword factor MASSIF from the AFFE_CARA_ELEM operator is used (see U4.42.01).
In the 2D case, the orientation of the coordinate system is taken into account by the ANGL_REP keyword, which only has one component left.
The table above gives the orientations chosen for each element:
QUAD4 |
|
|
TRIA3 |
|
|
5.3. Calculating local landmarks#
The local landmarks are formed by the vectors \(x\) and \(y\).
The values given in ANGL_REP define the following guidelines:
\(x\mathrm{=}(\mathrm{0,1})\) and \(y\mathrm{=}(\mathrm{-}\mathrm{1,0})\) for the QUAD4
\(x=\left(\frac{\sqrt{2}}{2},\frac{\sqrt{2}}{2}\right)\) and \(y=\left(\frac{-\sqrt{2}}{2},\frac{\sqrt{2}}{2}\right)\) for the TRIA3
5.4. Tested sizes#
The tested results are shown in the following table:
MAILLE |
Vector |
Component |
Reference Value |
Tolerance |
|
CPL4 |
|
|
|
|
|
CPL4 |
|
|
|
|
|
DPL4 |
|
|
|
|
|
DPL4 |
|
|
|
|
|
AXI4 |
|
|
|
|
|
AXI4 |
|
|
|
|
|
CPL3 |
|
|
|
|
|
CPL3 |
|
|
|
|
|
DPL3 |
|
|
|
|
|
DPL3 |
|
|
|
|
|
AXI3 |
|
|
|
|
|
AXI3 |
|
|
|
|
|
CPL4 |
|
|
|
|
|
CPL4 |
|
|
|
|
|
DPL4 |
|
|
|
|
|
DPL4 |
|
|
|
|
|
AXI4 |
|
|
|
|
|
AXI4 |
|
|
|
|
|
CPL3 |
|
|
|
|
|
CPL3 |
|
|
|
|
|
DPL3 |
|
|
|
|
|
DPL3 |
|
|
|
|
|
AXI3 |
|
|
|
|
|
AXI3 |
|
|
|
|