16. Keyword MEMBRANE#
16.1. Syntax#
MEMBRANE = _F (
♦ GROUP_MA = lgma, [l_gr_mesh]
♦/EPAIS = ep [real]
♦/ANGL_REP_1 = (\(\mathrm{\alpha }\), \(\mathrm{\beta }\)) [L_r]
/ANGL_REP_2 = (\(\mathrm{\alpha }\), \(\mathrm{\beta }\)) [L_r]
/VECT_1 = (vx, vy, vz) [L_r]
/VECT_2 = (vx, vy, vz) [L_r]
◊/N_INIT =/ninit [real]
/0. [default]
16.2. Affordable characteristics#
A distinction is made between two behaviors for the membrane. Linear behavior is available for small deformations and non-linear behavior for large deformations.
For linear behavior:
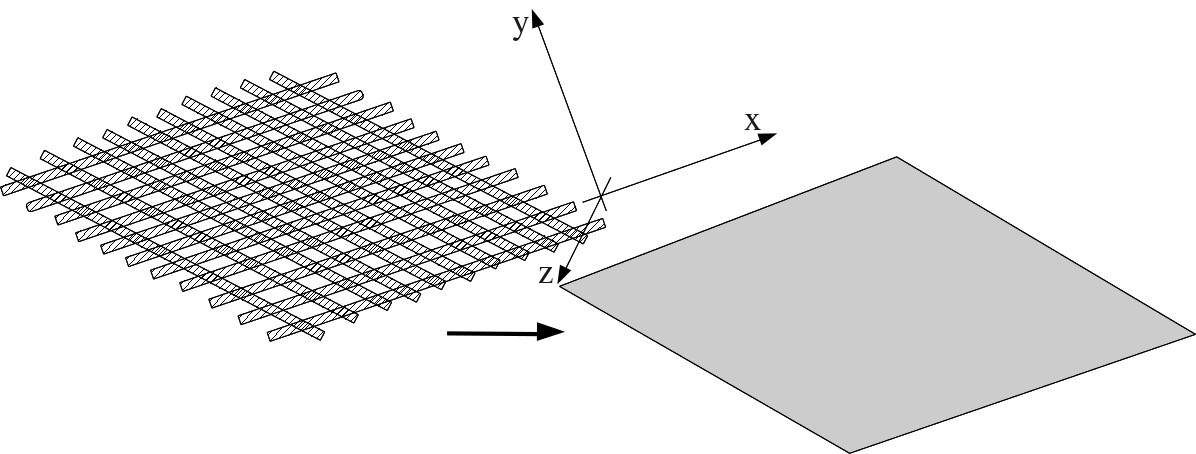
Figure 16.2-1 :replacing the frames with a membrane
The keyword MEMBRANE makes it possible to define the characteristics of an anisotropic sheet when modeling MEMBRANE is used (see for example test SSLS138 [V3.03.138]). In particular, it can be used to model elastic reinforcement layers in reinforced concrete shells. This modeling can be associated with interface elements to model the decohesion of this layer. The stiffness of this membrane is indicated under DEFI_MATERIAU/ELAS_MEMBRANE, cf. [U4.43.01].
For nonlinear behavior:
The keyword MEMBRANE makes it possible to define the characteristics of an isotropic membrane when modeling MEMBRANE is used (see for example test SSNS115a [V6.05.115]). The stiffness and Poisson’s ratio of this membrane are given under DEFI_MATERIAU/ELAS and the law of behavior under STAT_NON_LINE/RELATION/ELAS_MEMBRANE_SV or ELAS_MEMBRANE_NH [U4.51.11]. There are only two laws of hyper-elastic behavior: the Saint-Venant-Kirchhoff law and the Neo-Hookean law.
16.3. Description of operands#
♦/EPAIS = ep
EPAISreprésente the thickness of the membranewhich should be expressed in the same units as the coordinates of the mesh nodes. This thickness is not taken into account in small deformations and therefore only has an influence with non-linear behavior.
♦/ANGL_REP_1 = see ANGL_REPdu keyword shell [§8].
With linear behavior, this keyword defines the local coordinate system linked to the anisotropic behavior of the membrane, in which deformations and stresses are calculated. It allows you to define the reference axis \(x\) of the local coordinate system from two nautical angles. If we place ourselves in a non-linear way, as the membrane can only have isotropic behavior, the keyword will only be used to modify the constraint display frame.
/ANGL_REP_2 = see ANGL_REPdu keyword shell [§8].
Functioning identical to ANGL_REP_1mais, it allows you to define the reference axis \(y\) of the local coordinate system from two nautical angles.
/VECT_1 = (vx, vy, vz)
Just like ANGL_REP_1etANGL_REP_2, this keyword allows you to set the local coordinate system for the element. The projection of the vector entered using the keyword VECT_1 defines the local \(x\) vector.
/VECT_2 = (vx, vy, vz)
Just like ANGL_REP_1etANGL_REP_2, this keyword allows you to set the local coordinate system for the element. The projection of the vector entered using the keyword VECT_2 defines the local \(y\) vector. For example, in the case of a cylindrical geometry, it makes it possible to define the orientation of the membranes circumferentially.
◊/N_INIT =/ninit [real]
/0. [default]
This keyword makes it possible to define an initial pre-tension allowing the convergence of the nonlinear calculation (it is therefore useless in linear). It is only applied at the first step of time. It is expressed in units of force per unit of length.