1. Introduction#
1.1. Purpose of this document#
To say that two solid bodies brought into contact do not interpenetrate each other but that on the contrary a reciprocal effort is exerted on one another and that this effort disappears when the bodies no longer touch each other, is common sense. This is the most succinct definition that can be made of the « contact » problem: yet enforcing these conditions in a structural calculation code like Code_Aster requires a lot of effort.
Solving the contact problem finally means imposing a condition on the limits of inequalities on certain degrees of freedom of movement (negative or zero game) and finding an additional unknown which is the reciprocal effort exerted between the two bodies.
The difficulty comes from the strong non-linearity induced by this « pseudo-boundary condition ». In fact, the condition to be imposed on movements (to prevent any interpenetration) itself depends on the movements (which will determine at what point the surfaces come into contact).
The non-linearity due to contact taking into account is separated in Code_Aster into two points:
contact non-linearity (-friction): it results from contact conditions (-friction) which are not differentiable. To solve the problem, we have two main resolution families, which are: the formulation DISCRETEet the formulation CONTINUE. The first family is adapted to problems with a low number of contact unknowns and allows fast calculation times while the second is adapted to problems requiring the consideration of other mechanical non-linearities with contact and friction (plasticity and large transformations).
geometric non-linearity: it results from the large relative slips likely to occur between the surfaces in contact (lack of knowledge*a priori* of the effective final contact surfaces). Here we use a fixed point or Newton algorithm coupled with a geometric search.
In Code_Aster, in the presence of contact, the user must at minima identify potential contact surfaces. The resolution technique is then based on two fundamental steps:
Matching phase: it allows to treat geometric nonlinearity as a series of problems in small slips (where the problem is geometrically linear). The technique for determining effective contact surfaces and advice for setting up this phase are given in section 2.
Resolution phase: it makes it possible to solve the optimization problem under constraints related to the non-linearity of contact and possibly friction. The various optimization algorithms available are presented in section 3. It gives a path to choose an algorithm adapted to your case study.
It is essential to have understood that touch-friction is a non-linearity in its own right, in the same way as material nonlinearities (non-linear behavior law) and kinematic (large displacements, large rotations) nonlinearities. It therefore requires both to know the basics of contact theory and to understand the treatment of this one in Code_Aster in order to make the right modeling choices (meshing and data layout).
This document is there to assist the user in making these choices.
1.2. A vocabulary question#
To make it easier to read, some of the terms used extensively in this document are given here.
When talking about contact mechanics, two characteristic quantities are used:
the game is often rated \(g\) or \(d\). It characterizes the signed distance between two contact surfaces;
contact force density \(p\). It is the reciprocal effort exerted by one solid on the other when the game is closed (zero). It is carried by the normal to the contact surfaces. The term contact pressure will also be misused.
Master & slave zone: This is a solid border on which contact and friction conditions will be imposed. Contact is defined as a « solid couple. » In each couple, the master-slave role is crucial for the smooth running of a calculation.
Incompatible meshes: These are cases where the master mesh does not coincide with the slave mesh. These cases are extremely difficult to manage. The best method for these cases are the MORTAR methods called LAC that can only be used in continuous formulation. We will also talk about strong or weak mesh incompatibilities. There is no rigorous criterion for declaring a strong or a weak incompatibility. We let the art of the engineer decide according to the case to be treated. However, an example of strong and weak incompatibility is illustrated in the figure below.
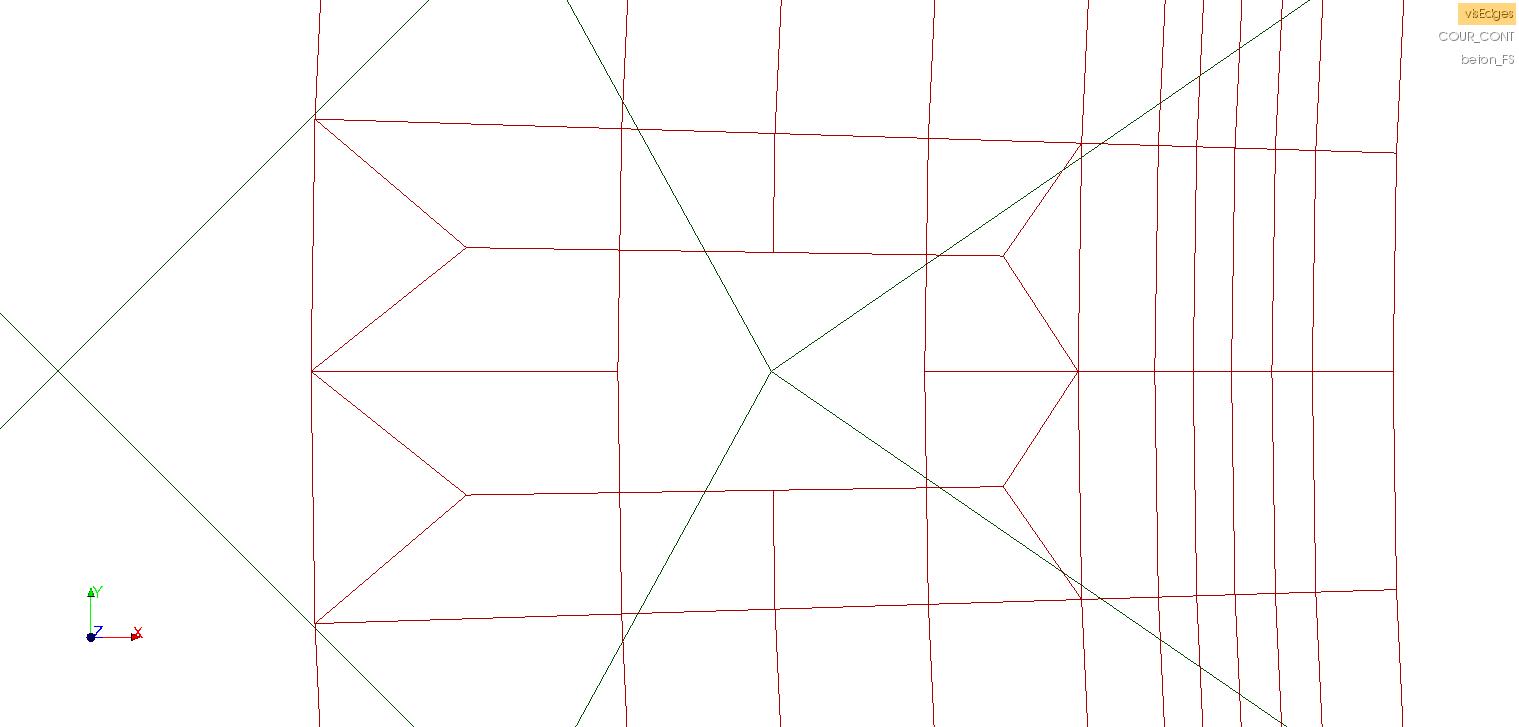
Strong incompatibilities
Figure 1.2-1: Examples of mesh incompatibilities
Contact states: it is the pair (game-pressure) characterizing a contact element. There are 2 possible contact states: contact (zero play, non-zero pressure) and detachment (non-zero play, zero pressure). The two situations being exclusive. Each state can have variants: grazing contact (almost zero play, pressure not zero but weak), free contact (zero play and high contact pressure), grazing detachment (reverse of grazing contact), frank detachment (reverse of grazing contact), frank detachment (reverse of free contact)
Cycling: this is a frequent case of non-convergence in contact calculations. The cycling situation is when a contact point or a contact mesh has difficulty stabilizing its status (touch/non-contact, stick/slip, slip/forward/backward sliding).
Hertz-Signorini-Moreau contact laws: like any law of behavior, interfaces between solids have their own mathematical formalisms. Contact laws derive from a non-regular mechanical formalism (just like the problems of break mechanics or cohesion for example): absence of differentiable energy from which we can easily write a force-displacement relationship.
LACou Mortar LAC: Local Average Contact is a method adapted to incompatible networks.
Oscillating contact pressures: in the case of incompatible meshes, it may happen that the contact pressures are oscillating in nature. This is noticeable thanks to a strong dispersion of contact pressure values.
These quantities are described in detail in the reference document [R5.03.50].
In the presence of friction, the following are also introduced:
the sliding direction \(\overrightarrow{t}\)
the friction force density \(\tau\), carried by \(-\vec{t}\).
In Code_Aster, a Coulomb friction criterion is used, the friction conditions are described in [R5.03.50].
1.3. Alternative contact and friction modeling#
Although the way of treating the phenomenon of touch-friction described in the introduction and in the main part of this document is the most widespread, it is not the only step. Code_Aster thus proposes two alternative models of mechanical interactions:
(hydro-) mechanical joint elements (models*_ JOINT *) for the representation of the opening of a crack under the pressure of a fluid and of the friction between the walls of the closed crack
discrete shock elements (models*_ DIS_T *) for the representation of a point contact by springs with possible consideration of friction
These two other models are both based on finite elements and therefore on specific laws of behavior (JOINT_MECA_FROT for joint elements and DIS_CHOC for discrete elements).
More details on these items are provided in § 4.10 and § 4.11.
Finally, it should be noted that it is possible to model contact on the edges of a crack represented with the X- FEM method. Please refer to the notice [U2.05.02] for more information.