2. Expression of free energy#
2.1. Taking into account the closure of cracks#
If one seeks to take into account the reclosing effect, great attention must be paid to the continuity of the stresses as a function of the deformations (which is an indispensable condition for a law of behavior in a finite element calculation software), Cf [bib2]. Indeed, if this effect is modelled too simplistically, the law of behavior is very likely to present a discontinuous response. One solution is to describe in detail what we call traction and compression, knowing that under tension (resp. compression) the crack will be considered « open » (resp. « closed »). A natural solution is to place yourself in a specific deformation frame. In such a coordinate system, elastic free energy is written (\(\lambda\) and \(m\) designating the Lamé coefficients):
\(\mathrm{\varphi }(\mathrm{\varepsilon })=\frac{\mathrm{\lambda }}{2}{(\text{tr}\mathrm{\varepsilon })}^{2}+\mathrm{\mu }\sum _{i}{\mathrm{\varepsilon }}_{i}^{2}\) eq 2.1-1
We can then define:
traction or volume compression, following the sign of \(\text{tr}\mathrm{\varepsilon }\),
traction or compression in each specific direction, following the sign of \({\varepsilon }_{i}\).
Elastic free energy can then be written as:
\(\mathrm{\varphi }(\mathrm{\varepsilon })=\frac{\mathrm{\lambda }}{2}\left[{(\text{tr}\mathrm{\varepsilon })}_{+}^{2}+{(\text{tr}\mathrm{\varepsilon })}_{-}^{2}\right]+\mathrm{\mu }\left[\text{tr}({\mathrm{\varepsilon }}_{+}^{2})+\text{tr}({\mathrm{\varepsilon }}_{-}^{2})\right]\) eq 2.1-2
with the following definitions for the parts positive and negative:
\({(\text{tr}\mathrm{\varepsilon })}_{+}=H(\text{tr}\mathrm{\varepsilon })\text{tr}\mathrm{\varepsilon }\); \({(\text{tr}\varepsilon )}_{-}=H(-\text{tr}\varepsilon )\text{tr}\varepsilon\); \(\text{tr}({\mathrm{\varepsilon }}_{+}^{2})=\sum _{i}H({\mathrm{\varepsilon }}_{i}){\mathrm{\varepsilon }}_{i}^{2}\); \(\text{tr}({\mathrm{\varepsilon }}_{-}^{2})=\sum _{i}H(-{\mathrm{\varepsilon }}_{i}){\mathrm{\varepsilon }}_{i}^{2}\)
where \(H\) is the Heaviside function.
Note:
A more detailed study of the properties of the positive and negative parts of a tensor is done in Appendix 1.
2.2. Introduction of damage variables#
Given the complexity of damage mechanisms, and after recognizing that it was difficult to describe the behavior of concrete using only one damage variable, we chose to introduce two damage variables:
A \(D\) tensor of order 2 relating to the damage created during traction
A \(d\) scalar relating to the damage created by compression
Note:
The choice of a second-order tensor to model tensile damage is relatively classical and intuitive. It makes it possible to describe the preferred orientation of cracks orthogonally to the direction of greatest traction. The question of the damage created during compression (orthotropic or isotropic?) is much less clear.
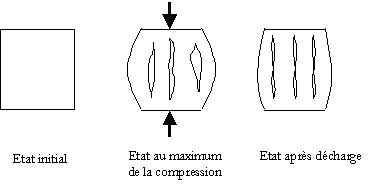
Assume for simplicity that cracks can only be generated in planes orthogonal to \({\overrightarrow{e}}_{1}\) , \({\overrightarrow{e}}_{2}\) or \({\overrightarrow{e}}_{3}\). In the case of simple traction in the direction \({\overrightarrow{e}}_{1}\) , cracks are created in the plane orthogonal to \({\overrightarrow{e}}_{1}\) , resulting in a loss of stiffness in the direction \({\overrightarrow{e}}_{1}\). If one then exerts a simple pull in the direction \({\overrightarrow{e}}_{2}\) , one does not « see » the crack because the load is parallel to the plane of the crack and the stiffness is not affected. The damage is therefore clearly anisotropic under traction. In the case of simple compression in the direction \({\overrightarrow{e}}_{1}\) * , cracks are created in the planes orthogonal to \({\overrightarrow{e}}_{2}\) and \({\overrightarrow{e}}_{3}\). If you then load with compression in the direction \({\overrightarrow{e}}_{2}\) , you « see » the cracks orthogonal to \({\overrightarrow{e}}_{3}\). The stiffness in the direction \({\overrightarrow{e}}_{2}\) is therefore lower than the normal stiffness that is not degraded, but it is stronger than the stiffness in the direction \({\overrightarrow{e}}_{1}\) because the compression in the direction \({\overrightarrow{e}}_{1}\) is sensitive to all cracks, that is to say orthogonal to \({\overrightarrow{e}}_{2}\) and to \({\overrightarrow{e}}_{3}\) . Consequently, compression damage appears to be less anisotropic than under tension, but not completely isotropic. In the absence of a clear physical argument about the isotropic or anisotropic nature of compression damage, we chose to take it isotropic for reasons of simplicity.
We pose \(B=I-D\) representing the integrity of the material under tension. Tensile damage is introduced in the « positive » terms for free energy [éq 2.1-2] and compression damage in the negative terms. Free energy is now defined as follows:
\(\mathrm{\varphi }(\mathrm{\varepsilon },\mathrm{\Beta },d)=\frac{\mathrm{\lambda }}{2}\left[{(\text{tr}\text{B \varepsilon })}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\mathrm{\varepsilon })}_{-}^{2}\right]+\mathrm{\mu }\left[\frac{1}{4}\text{tr}({(\mathrm{\Beta \; \varepsilon }+\mathrm{\varepsilon \; B})}_{+}^{2})+{(1-d)}^{2}\text{tr}({\mathrm{\varepsilon }}_{-}^{2})\right]\) eq 2.2-1
Note:
The convexity of free energy with respect to deformation on the one hand, and of damage variables simultaneously on the other hand, is well respected. We will refer to [bib2] and [bib1] for a demonstration.
2.3. Terminals of damage#
Ruin, or the creation of a crack that completely penetrates the element of matter in question, imposes an upper limit on damage. This limit is imposed on each eigenvalue of the tensile damage (\({D}_{i}\in \left[\mathrm{0,1}\right]\) where \({D}_{i}\) designate the eigenvalues of \(D\)), which makes it possible to reach the ruin in 3 orthogonal directions. An indicative function convex in relation to damage, \({I}_{]-\infty \mathrm{,1}]}\) for*D* or \({I}_{[\mathrm{0,}\infty [:ref:\)}` pour \(B\) , est donc utilisée pour contrôler chacune des valeurs propres de l’endommagement (cf. [bib2 <}` pour \(B\) , est donc utilisée pour contrôler chacune des valeurs propres de l’endommagement (cf. [bib2>`]). Likewise, an indicator on the value of scalar compression damage is used. The following free energy expression is obtained:
\(\begin{array}{cc}\varphi (\varepsilon ,B,d)& =\frac{\lambda }{2}\left[{(\text{tr}B\varepsilon )}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\frac{1}{4}\text{tr}({(B\varepsilon +\varepsilon B)}_{+}^{2})+{(1-d)}^{2}\text{tr}({\varepsilon }_{-}^{2})\right]\\ & +{I}_{[\mathrm{0,}\infty [}\left[\text{min}({B}_{i})\right]+{I}_{]-\infty \mathrm{,1}]}\left[d\right]\end{array}\) eq 2.3-1
Note:
It follows from this expression that once the damage is 1 in a specific direction, this natural direction is now blocked and the damage can no longer evolve only in the plane perpendicular to this direction. The demonstration of this point can be found in Appendix 2.
2.4. Introduction of blocked energy#
We propose to introduce blocked energy in order to better control the evolution of damage as a function of loading, in the form used by [bib4]. The idea is to introduce an additional term in energy that depends only on the damage, and not on the state of deformation. This then results in an additional term in the derivation of the thermodynamic forces that control the evolution of the damage (cf. section [§ 3]). On the other hand, this additional term does not imply any modification of the expression of the constraint.
Energy is written as follows:
\(\begin{array}{cc}\varphi (\varepsilon ,B,d)& =\frac{\lambda }{2}\left[{(\text{tr}B\varepsilon )}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\frac{1}{4}\text{tr}({(B\varepsilon +\varepsilon B)}_{+}^{2})+{(1-d)}^{2}\text{tr}({\varepsilon }_{-}^{2})\right]\\ & +{I}_{[\mathrm{0,}\infty [}\left[\text{min}({B}_{i})\right]+{I}_{]-\infty \mathrm{,1}]}\left[d\right]+{\psi }^{\text{bloquée}}(B,d)\end{array}\) eq 2.4-1
where \({\mathrm{\psi }}^{\text{bloquée}}(B,d)\) is a convex function of the damage. We choose to take in this zero extra energy when the material is healthy. It must also be expressed using damage tensor invariants. Finally, we want the additional term in the expression of thermodynamic forces to depend on the damage, which makes it possible to eliminate the choice of a linear term in damage for energy \({\mathrm{\psi }}^{\text{bloquée}}(B,d)\).
We opted for the following expression:
\(\begin{array}{cc}{\psi }^{\text{bloquée}}(B,d)& =\frac{{\gamma }_{B}}{2}\text{tr}({(\text{I - B})}^{2})+{\gamma }_{d}{d}^{2}\\ & =\frac{{\gamma }_{B}}{2}\text{tr}({D}^{2})+{\gamma }_{d}{d}^{2}\end{array}\) eq 2.4-2
where \({\gamma }_{B}\) and \({\gamma }_{d}\) are model parameters.
Note:
One can ask the question of the physical meaning of this additional energy. The evolution of damage in fact gives rise in energy to the appearance of energy « blocked » by the system, and this energy is not zero when the material is ruined. Therefore, if we assess the energy balance of the creation of a crack, only part of the energy consumed corresponds to the dissipation of energy in the form of heat, while another part remains blocked.
|
2.5. Final expression of the free energy, stresses, and thermodynamic forces associated with damage variables#
The final expression for free energy is written as:
\(\begin{array}{cc}\varphi (\varepsilon ,B,d)& =\frac{\lambda }{2}\left[{(\text{tr}B\varepsilon )}_{+}^{2}+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}^{2}\right]+\mu \left[\frac{1}{4}\text{tr}({(B\varepsilon +\varepsilon B)}_{+}^{2})+{(1-d)}^{2}\text{tr}({\varepsilon }_{-}^{2})\right]\\ & +{I}_{[\mathrm{0,}\infty [}\left[\text{min}({B}_{i})\right]+{I}_{]-\infty \mathrm{,1}]}\left[d\right]+{\psi }^{\text{bloquée}}(B,d)\end{array}\) eq 2.5-1
The stress expression deduces the energy by derivation with respect to the deformations:
\(\begin{array}{}\sigma (\varepsilon ,B,d)=\frac{\partial \varphi }{\partial \varepsilon }=\lambda \left[{(\text{tr}B\varepsilon )}_{+}B+{(1-d)}^{2}{(\text{tr}\varepsilon )}_{-}I\right]\\ +\mu \left[\frac{1}{2}({(B\varepsilon +\varepsilon B)}_{+}B+B{(B\varepsilon +\varepsilon B)}_{+})+2{(1-d)}^{2}{\varepsilon }_{-}\right]\end{array}\) eq 2.5-2
The continuity of the constraint results from the continuity of the eigenvalues of a matrix with respect to this matrix (cf. the Ostrowski theorem in [bib4]).
Note:
However, a defect appears at the « open-closed » passage. The areas of activation and deactivation of the terms of opening and closing cracks do not coincide. This is due to the fact that opening and closing are not associated with the separation into positive and negative parts of the same quantities (opening: damage combined with deformation, closing: deformation alone). However, this does not affect the continuity property. It also appears that this defect is limited to a zone close to the origin of the deformations, where it does not cause physical aberration, and that it has no impact outside this interval (cf. [bib2]). The formalism proposed in [bib3], making it possible to ensure the continuity of the stress while taking into account the effect of closing cracks, has the same defect.
In addition, the expression of the thermodynamic forces associated with damage is deduced from free energy:
\({F}^{B}(\varepsilon ,B)=-\frac{\partial \varphi }{\partial B}=-\lambda {(\text{tr}B\varepsilon )}_{+}\varepsilon -\frac{\mu }{2}\left[{(B\varepsilon +\varepsilon B)}_{+}\varepsilon +\varepsilon {(B\varepsilon +\varepsilon B)}_{+}\right]+{\gamma }_{B}(\text{I - B})\) eq 2.5-3
\({F}^{d}(\varepsilon ,d)=-\frac{\partial \varphi }{\partial d}=\lambda (1-d){(\text{tr}\varepsilon )}_{-}^{2}+2\mu (1-d)\text{tr}({\varepsilon }_{-}^{2})-2{\gamma }_{d}d\) eq 2.5-4
Each thermodynamic force consists of two parts:
A part dependent on deformation and damage, which is derived from the elastic part of energy.
A part that only depends on damage, which is derived from blocked energy. This term will play the role of work hardening, and makes it possible to control the stress-strain response. We can see that the terms deriving from the energy blocked in each of the thermodynamic forces are independent of each other, which makes it easier to control the evolution of each of the damage variables.