6. C modeling#
6.1. Characteristics of modeling#
Simulation at the hardware point.
6.2. Tested sizes and results#
The solutions are post-processed at the single point of the model and compared to non-regression values
in terms of isotropic effective pressure \(P\text{'}\), with:
\(P\text{'}=\frac{1}{3}\mathit{tr}(\mathrm{\sigma }\text{'})\)
Identification |
Reference type |
Reference value |
Tolerance |
\(t=70.s\) |
“AUTRE_ASTER” |
167597.Pa |
|
\(t=\mathrm{91,15}s\) |
“AUTRE_ASTER” |
|
|
\(t=\mathrm{99,3}s\) |
“AUTRE_ASTER” |
|
|
And deviatoric constraint \(Q\), with:
\(Q={\mathrm{\sigma }}_{\mathit{zz}}-{\mathrm{\sigma }}_{\mathit{xx}}\)
Identification |
Reference type |
Reference value |
Tolerance |
\(t=70.s\) |
“AUTRE_ASTER” |
110000.Pa |
|
\(t=\mathrm{91,15}s\) |
“AUTRE_ASTER” |
-69201. Not |
|
\(t=\mathrm{99,3}s\) |
“AUTRE_ASTER” |
|
|
6.3. notes#
The purpose of this modeling is to treat the passage of the instability line in the case of loose sand. In fact, the constraint deviator \(Q\) has a maximum on this line whose value is less than the imposed maximum stress setpoint \({Q}_{\mathit{max}}=110\mathit{kPa}\). Consequently, the stress control of the test is not possible at this location, and generally leads either to a discrepancy in the calculation, or to a false result that is perfectly unstable (very significant jump in stress and deformation, see the red curve in the Figure). The calculation of the exact solution involves switching the test to controlled deformation when instability is detected (blue curve).
line of instability
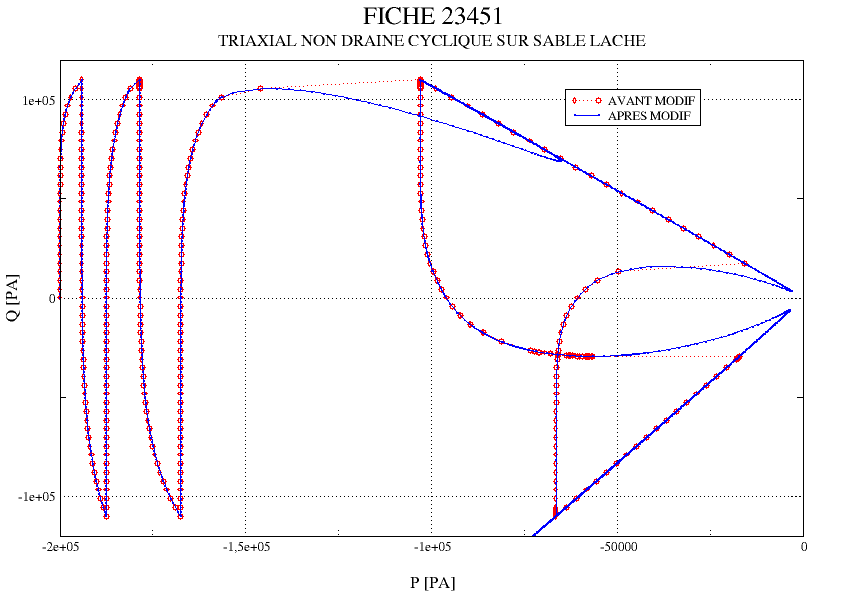
Figure 6.3-1: Comparison of the solution under controlled stress (red) and under controlled deformation (blue) when crossing the instability line