3. Modeling A#
3.1. Characteristic of modeling#
Hardware point modeling, in large deformations. ALGO_INTE =” NEWTON “.
3.2. Tested sizes and results#
Identification |
Moments ( \(h\) ) |
Reference |
Aster |
Tolerance |
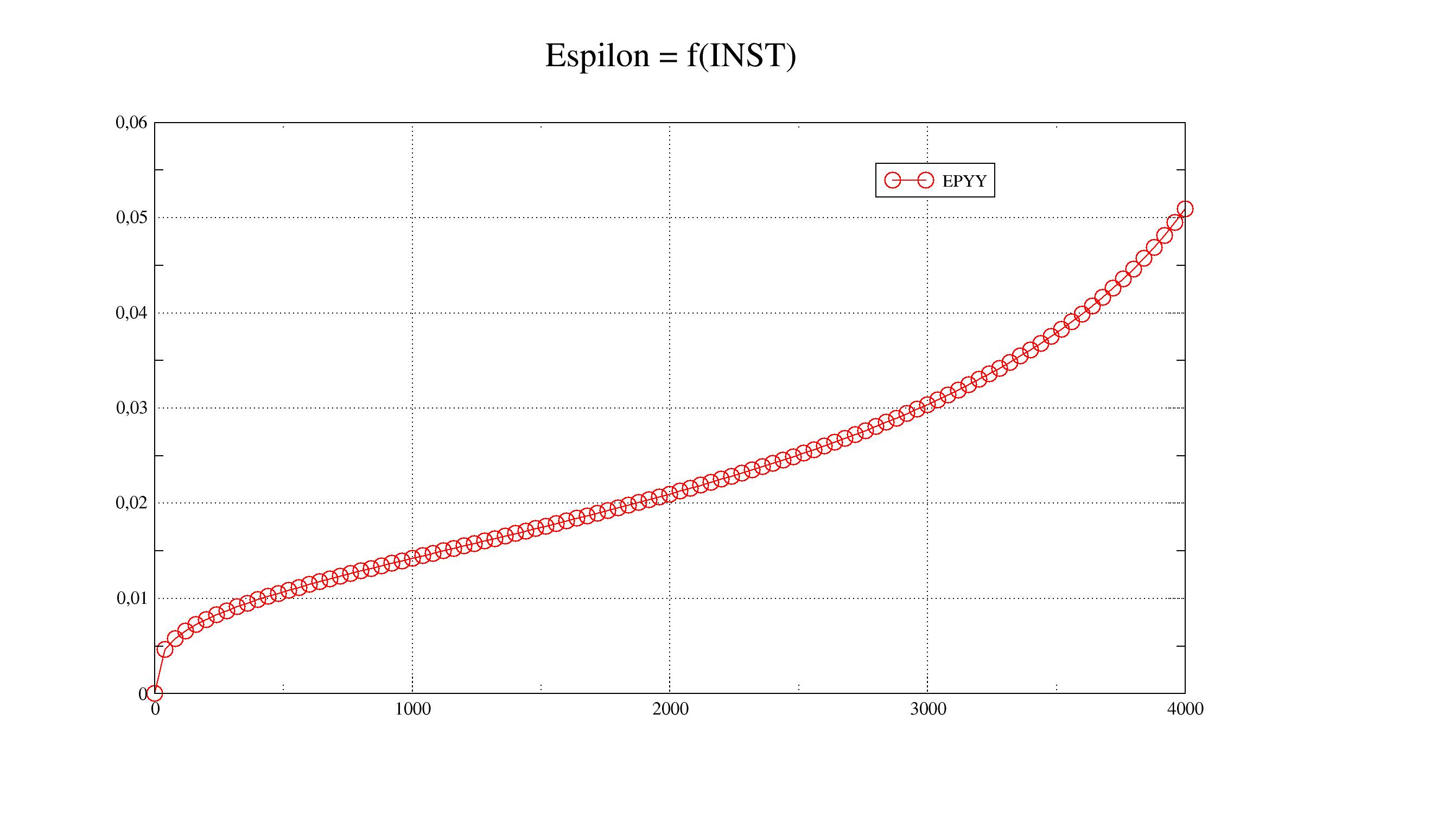
\(\mathit{EPYY}\) |
2000 |
non-regression |
0.020895 |
Not applicable |
\(\mathit{EPYY}\) |
4000 |
non-regression |
0.050575 |
Not applicable |
\(\mathit{V11}(\mathit{endo})\) |
2000 |
non-regression |
0.032175 |
Not applicable |
\(\mathit{V11}(\mathit{endo})\) |
4000 |
non-regression |
0.067927 |
Not applicable |
\(\mathit{dEPYY}\mathrm{/}\mathit{dt}\) |
1520 |
non-regression |
6,64091E-6 |
Not applicable |
The creep curve obtained (\(\epsilon =f(t)\)) with this model is as follows: