3. Modeling A#
3.1. Characteristics of modeling#
Model A is modelled using elements DIS_T
3.2. Characteristics of the mesh#
Number of knots: 2
Number of meshes: 3 DIS_T to model the mass (M_T_D_N), the stiffness (K_T_D_L) and the shock absorber (A_T_D_L)
3.3. Results#
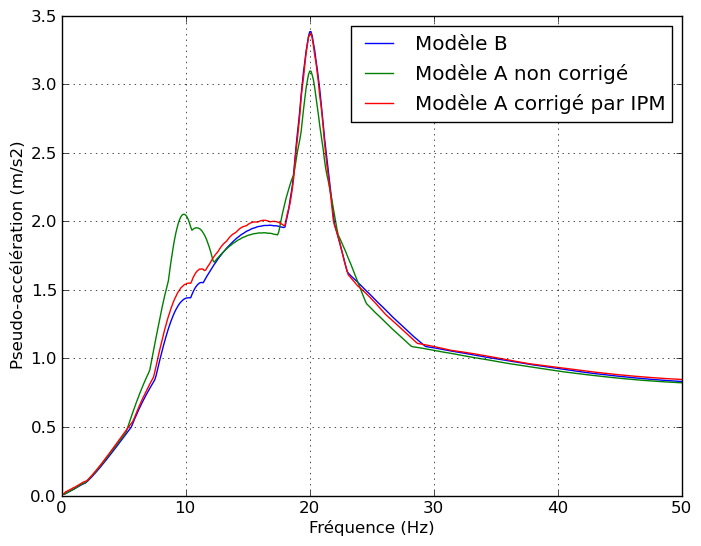
The vertical response spectrum obtained using the macro-command CALC_SPECTRE_IPM from the vertical acceleration of the node N 02 is compared to that obtained using the model B. We are in a case with relative coordinate resolution (single-press loading).
A check of the pseudo_acceleration values is performed for several acceleration values.
Node |
Frequency |
Reference |
Reference Type |
Tolerance |
N02 |
5 |
0.425896 |
“AUTRE_ASTER” |
3% |
N02 |
10 |
1.44050 |
“AUTRE_ASTER” |
3% |
N02 |
15 |
1.93754 |
“AUTRE_ASTER” |
0.1% |
N02 |
20 |
3.39816 |
“AUTRE_ASTER” |
0, 5% |
N02 |
25 |
1.46011 |
“AUTRE_ASTER” |
1% |
N02 |
30 |
1.08058 |
“AUTRE_ASTER” |
1.1% |
N02 |
35 |
1.00117 |
“AUTRE_ASTER” |
0, 9% |
N02 |
40 |
0.929183 |
“AUTRE_ASTER” |
0, 3% |
N02 |
45 |
0.871687 |
“AUTRE_ASTER” |
1% |
N02 |
50 |
0.833936 |
“AUTRE_ASTER” |
1, 9% |
The treatment of the case is also validated in absolute reference, by comparison with the result in relation to a zero training signal.
Finally, we validate the initial correction (CORR_INIT =” OUI “) for which a non-zero initial acceleration is required. To do this, we will shift the training signal slightly in time: \(f(t)=\mathrm{sin}(2\mathrm{\pi }20.(t+0.00001))\). The answer obtained will therefore remain very close to the initial calculation without this delay.