3. Modeling A#
3.1. Characteristics of modeling#
The springs and point masses are modelled by discrete elements with 3 degrees of freedom DIS_T. Nodes \(N2\) and \(N3\) are slightly offset according to \(Y\), \(Y=\mathrm{0,01}m\) and \(Y=-\mathrm{0,01}m\) respectively, which does not change the results as only the problem according to \(X\) is solved.
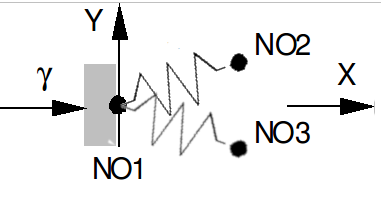
Node \(N1\) is embedded and subjected to an imposed acceleration \(\gamma (t)\).
The mode of the first spring mass system is first calculated by imposing \({u}_{x}({P}_{3})=0\). Then the mode of the second, by imposing \({u}_{x}({P}_{2})=0\). A single modal base is created from these two modes, using the DEFI_BASE_MODALE command with the NUME_REF option. A dynamic calculation is then performed with the command DYNA_NON_LINE using modal damping deduced from these modes.
3.2. Characteristics of the mesh#
Number of knots: 3
Number of meshes and types: 2 DIS_T
3.3. Tested sizes and results#
The solutions tested are the relative displacement in \(t=10s\):
Node |
Reference |
Tolerance |
\(N2\) (dot \({P}_{2}\)) |
0.538736 |
|
\(N3\) (dot \({P}_{3}\)) |
0.538736 |
|