3. Modeling of touch/friction by penalization#
3.1. Normal contact force model#
The principle of penalization applied to the graph in the figure consists in introducing an unequivocal relationship \({F}_{N}^{1/2}={f}_{\mathrm{ϵ}}\left({d}_{N}^{1/2}\right)\) by means of a parameter \(\varepsilon\). The \({f}_{\varepsilon }\) graph should tend towards the Signorin graph when \(\varepsilon\) tends to zero (see [2]). One of the possibilities is to propose a linear relationship between \({d}_{N}^{1/2}\) and \({F}_{N}^{1/2}\):
If we note \({K}_{N}=\frac{1}{\mathrm{ϵ}}\) (commonly called shock stiffness) we find the classical relationship, modeling an elastic shock:
The approximate graph of the law of contact with penalization is in the figure.

Figure 3-1: Graph of the unilateral contact relationship approximated by penalization
To take into account a possible loss of energy in the shock, shock absorption \({C}_{N}\) is introduced. The expression for the normal contact force is then expressed as:
Where \({\dot{u}}_{N}^{1/2}\) is the relative normal speed of \({O}_{1}\) compared to \({O}_{2}\). To respect the Signorin relationship (no adhesion in contact), on the other hand, we must check afterwards whether \({F}_{N}^{1/2}\) is positive or zero. So we will only take the positive part \({⟨\cdot ⟩}^{+}\) of the expression ():
The complete relationship giving the normal contact force that is retained for the algorithm is as follows:
3.2. Tangential contact force model#
The graph describing the tangential force with Coulomb’s law is non-differentiable for the adhesion phase \({\dot{u}}_{T}^{1/2}=0\). A univocal relationship is therefore introduced linking the relative tangential displacement \({d}_{T}^{1/2}\) and the tangential force \({F}_{T}^{1/2}={f}_{\mathrm{\xi }}\left({d}_{T}^{1/2}\right)\) by means of a parameter \(\xi\). The \({f}_{\xi }\) graph should tend towards the Coulomb graph when \(\xi\) tends to zero (see [2]). One of the possibilities is to write a linear relationship between \({d}_{T}^{1/2}\) and \({F}_{T}^{1/2}\) for incremental writing:
With \({\left(\cdot \right)}_{T\mathrm{,0}}\) the quantities at the previous time step. If we introduce a tangential stiffness \({K}_{T}=\frac{1}{\mathrm{\xi }}\), we get the relationship:
The approximate graph of Coulomb’s law of friction modeled by penalization is in the figure. For numerical reasons, linked to the dissipation of parasitic vibrations (see [3]) during the adhesion phase, it is necessary to add tangential damping \({C}_{T}\) in the expression of the tangential force. Its final expression is:
In addition, this force must satisfy the Coulomb criterion, namely:
If this is not the case, the frictional force is corrected by the following formula:
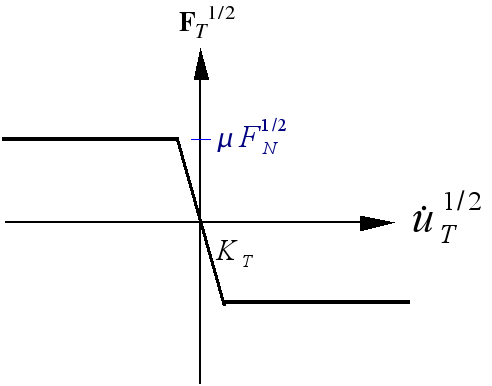
Figure 3-2: Graph of the law of friction approximated by penalization
In the case of the extension of Coulomb’s law with the distinction between the adhesion coefficient \({\mu }_{s}\) and the sliding coefficient \({\mu }_{d}\), the approximate graph of the law is modified (see figure).
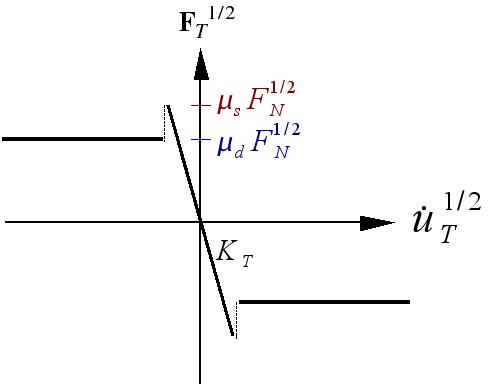
Figure 3-3: Graph of the variant of the law of friction approximated by penalization