3. Operands#
3.1. Operand TYPE#
The TYPE operand makes it possible to give the envelope form of the game in the shock link by a text from among the following: PLAN_Y, PLAN_Z, CERCLE, DISCRET, BI_PLAN_Y, BI_PLAN_Z, BI_CERCLE and BI_CERC_INT;
Obstacles of the type PLAN_Y, PLAN_Z, CERCLE and DISCRET define the geometry of the places of collision between a mobile structure and an undeformable obstacle. They are plotted below [Figure 3.1-a] according to the type chosen.

Figure 3.1-a
The value of the game and the local coordinate system \((\mathit{Xloc},\mathit{Yloc},\mathit{Zloc})\) will be defined when the obstacle is used (see operator DYNA_TRAN_MODAL [U4.53.21]). The origin of this reference frame being the location of the wire structure in question.
In the case of the obstacle TYPE = “DISCRET”, the curve defining the outline and the game must be specified simultaneously, using the key word VALE.
The types BI_PLAN_Y, BI_PLAN_Z, BI_CERCLE and BI_CERC_INT make it possible to define the possible contact locations of the wire structure between two nodes \(\mathit{NO1}\) and \(\mathit{NO2}\) each belonging to a mobile structure. The geometries of plane-to-plane (or circle upon circle) contact links are described in figure [Figure 3.1-b] below.

Figure 3.1-b
The value of the thicknesses of material surrounding the shock nodes (\(\mathit{D1}\) and \(\mathit{D2}\) for an obstacle of type BI_PLAN_ *, \(\mathit{R1}\) and \(\mathit{R2}\) for an obstacle of type BI_CERCLE or BI_CERC_INT) as well as the local coordinate system \((\mathit{Xloc},\mathit{Yloc},\mathit{Zloc})\) are defined at the time of use of the obstacle, that is to say in the operator DYNA_TRAN_MODAL [U4.53.21].
Several initial forms, in particular for the study of the vibrations of control clusters, are defined. They correspond to the pencil of the various control clusters and to their guides.
3.2. Operands VALE/VERIF#
◊ VALE = thetar
In the case of obstacle DISCRET, the curve defining the outline and the game must be specified simultaneously, using the keyword VALE.
thetar is the list of real numbers used to describe the outline of the DISCRET obstacle in polar coordinates. We describe the obstacle as a flat polar curve by giving pairs of values, the first being the angle in degrees from 0 to 360°, the second the radius [Figure3.2-a]. When defining the obstacle, consider that the y-axis corresponds to an angle of 0°.
VALE = (0.0, 0.00086,
30.0, 0.001, 90.0, 0.001, 150.0, 0.001, 210.0, 0.001, 270.0, 0.001, 330.0, 0.001, 36.00, 0.00086,)
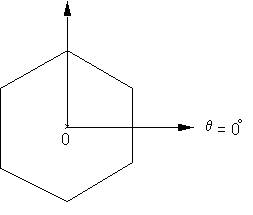
Figure 3.2-a
◊ VERIF = “FERME”
Key word used to check whether the given polar curve is properly closed.